I. Hệ tọa độ trong không gian
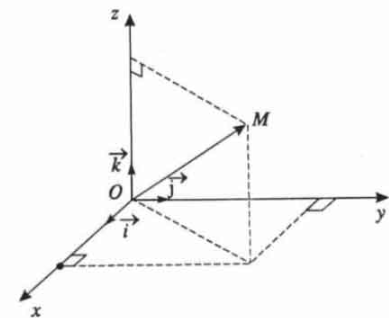
- Hệ trục tọa độ \(Oxyz\) với các véc tơ đơn vị trên các trục \(Ox,Oy,Oz\) theo thứ tự là \(\overrightarrow i ,\overrightarrow j ,\overrightarrow k \) với:
\(\left| {\overrightarrow i } \right| = \left| {\overrightarrow j } \right| = \left| {\overrightarrow k } \right| = 1\) hoặc \({\overrightarrow i ^2} = {\overrightarrow j ^2} = {\overrightarrow k ^2} = 1\) và \(\overrightarrow i .\overrightarrow j = \overrightarrow j .\overrightarrow k = \overrightarrow k .\overrightarrow i = 0\)
- Các trục tọa độ \(Ox\): trục hoành; \(Oy\): trục tung; \(Oz\): trục cao.
- Các mặt phẳng tọa độ: \(\left( {Oxy} \right),\left( {Oyz} \right),\left( {Ozx} \right)\).
II. Tọa độ điểm trong không gian
- Điểm \(M\left( {x;y;z} \right) \Leftrightarrow \overrightarrow {OM} = x.\overrightarrow i + y.\overrightarrow j + z.\overrightarrow k \)
- Nếu \(I;J;K\) là hình chiếu của \(M\) lên các trục \(Ox,Oy,Oz\) thì \(I\left( {x;0;0} \right),J\left( {0;y;0} \right),K\left( {0;0;z} \right),\) \(x = \overline {OI} ,y = \overline {OJ} ,z = \overline {OK} \).
- Nếu \(D;E;F\) là hình chiếu của \(M\) lên các mặt phẳng tọa độ \(\left( {Oxy} \right),\left( {Oyz} \right),\left( {Ozx} \right)\) thì \(D\left( {x;y;0} \right),E\left( {0;y;z} \right),F\left( {x;0;z} \right)\).
Khi chiếu một điểm lên các trục tọa độ hoặc mặt phẳng tọa độ thì ta có thể nhớ theo quy tắc: “Chiếu lên cái gì thì giữ nguyên cái đó, còn lại cho bằng \(0\)”.
- Tọa độ trung điểm đoạn thẳng \(AB\) là \(M\left( {\dfrac{{{x_A} + {x_B}}}{2};\dfrac{{{y_A} + {y_B}}}{2};\dfrac{{{z_A} + {z_B}}}{2}} \right)\)
- Tọa độ trọng tâm tam giác \(ABC\) là \(G\left( {\dfrac{{{x_A} + {x_B} + {x_C}}}{3};\dfrac{{{y_A} + {y_B} + {y_C}}}{3};\dfrac{{{z_A} + {z_B} + {z_C}}}{3}} \right)\)
- Tọa độ trọng tâm tứ diện \(ABCD\) là \(( {\dfrac{{{x_A} + {x_B} + {x_C} + {x_D}}}{4};\dfrac{{{y_A} + {y_B} + {y_C} + {y_D}}}{4};\dfrac{{{z_A} + {z_B} + {z_C} + {z_D}}}{4}}) \)
III. Tọa độ véc tơ
1. Định nghĩa
Trong không gian tọa độ \(Oxyz\) cho véc tơ \(\overrightarrow u \). Tồn tại duy nhất bộ số thực \(\left( {x;y;z} \right)\) sao cho \(\overrightarrow u = x.\overrightarrow i + y.\overrightarrow j + z.\overrightarrow k \). Khi đó \(\left( {x;y;z} \right)\) được gọi là tọa độ của véc tơ \(\overrightarrow u \). Kí hiệu \(\overrightarrow u = \left( {x;y;z} \right)\) hoặc \(\overrightarrow u \left( {x;y;z} \right)\).
2. Tính chất
Cho các véc tơ \(\overrightarrow {{u_1}} \left( {{x_1};{y_1};{z_1}} \right)\) và \(\overrightarrow {{u_2}} \left( {{x_2};{y_2};{z_2}} \right),k\) là một số thực tùy ý. Ta có các tính chất sau:
+) \(\overrightarrow {{u_1}} = \overrightarrow {{u_2}} \Leftrightarrow \left\{ \begin{array}{l}{x_1} = {x_2}\\{y_1} = {y_2}\\{z_1} = {z_2}\end{array} \right.\)
+) \(\overrightarrow {{u_1}} \pm \overrightarrow {{u_2}} = \left( {{x_1} \pm {x_2};{y_1} \pm {y_2};{z_1} \pm {z_2}} \right)\)
+) \(k\overrightarrow {{u_1}} = \left( {k{x_1};k{y_1};k{z_1}} \right)\)
+) \(\overrightarrow {{u_1}} .\overrightarrow {{u_2}} = {x_1}{x_2} + {y_1}{y_2} + {z_1}{z_2}\)
+) \(\left| {\overrightarrow {{u_1}} } \right| = \sqrt {{{\overrightarrow {{u_1}} }^2}} = \sqrt {x_1^2 + y_1^2 + z_1^2} \)
+) \(\overrightarrow {{u_1}} \bot \overrightarrow {{u_2}} \Leftrightarrow \overrightarrow {{u_1}} .\overrightarrow {{u_2}} = 0 \) \(\Leftrightarrow {x_1}{x_2} + {y_1}{y_2} + {z_1}{z_2} = 0\)
+) \(\cos \left( {\overrightarrow {{u_1}} ,\overrightarrow {{u_2}} } \right) = \dfrac{{\overrightarrow {{u_1}} .\overrightarrow {{u_2}} }}{{\left| {\overrightarrow {{u_1}} } \right|.\left| {\overrightarrow {{u_2}} } \right|}} \) \(= \dfrac{{{x_1}{x_2} + {y_1}{y_2} + {z_1}{z_2}}}{{\sqrt {x_1^2 + y_1^2 + z_1^2} .\sqrt {x_2^2 + y_2^2 + z_2^2} }}\) với \(\overrightarrow {{u_1}} \ne \overrightarrow 0 ,\overrightarrow {{u_2}} \ne \overrightarrow 0 \)
3. Liên hệ giữa tọa độ véc tơ và tọa độ các điểm mút
+) \(\overrightarrow {AB} = \left( {{x_B} - {x_A};{y_B} - {y_A};{z_B} - {z_A}} \right)\)
+) \(AB = \left| {\overrightarrow {AB} } \right| \) \(= \sqrt {{{\left( {{x_B} - {x_A}} \right)}^2} + {{\left( {{y_B} - {y_A}} \right)}^2} + {{\left( {{z_B} - {z_A}} \right)}^2}} \)