I. Sơ đồ tóm tắt lý thuyết Con lắc đơn
II. Con lắc đơn - Các đại lượng đặc trưng - Viết phương trình dao động của con lắc đơn
I- NỘI DUNG
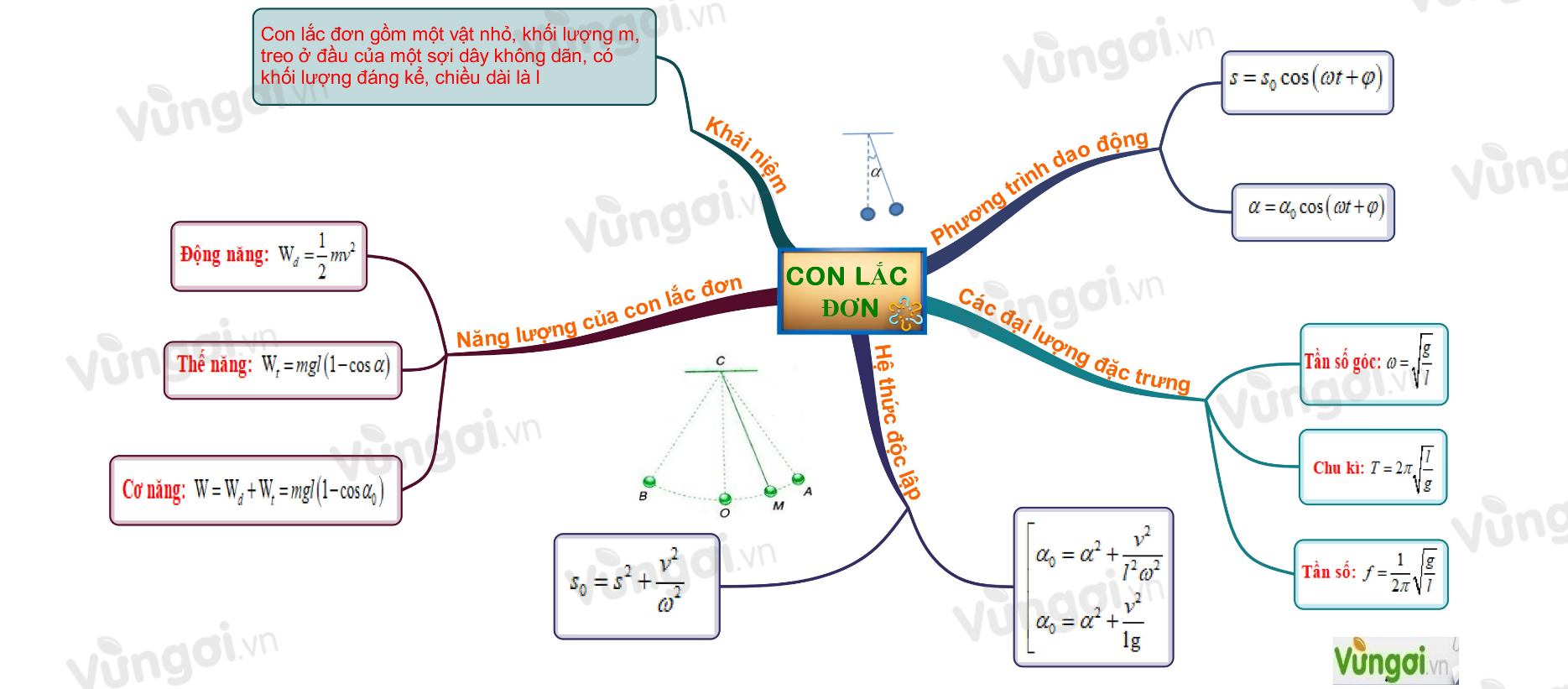
1. Khái niệm về con lắc đơn
Con lắc đơn gồm một vật nhỏ, khối lượng m, treo ở đầu của một sợi dây không dãn, khối lượng không đáng kể, dài l

2. Dao động điều hòa của con lắc đơn
Phương trình dao động điều hòa của con lắc đơn:
s=s0cos(ωt+φ)hayα=α0cos(ωt+φ) với s0=lα0
Các đại lượng trong dao động điều hòa của con lắc đơn:
- Tần số góc, chu kì, tần số:
ω=√gl,T=2π√lg
- Điều kiện để con lắc đơn dao động điều hòa: dao động nhỏ (sinα≈α )
- Hệ thức độc lập: s20=s2+v2ω2 hay α20=α2+v2l2ω2 hoặc α20=α2+v2lg
3. Năng lượng của con lắc đơn
- Động năng: Wd=12mv2
- Thế năng: Wt=mgl(1−cosα)
- Cơ năng - ĐL bảo toàn cơ năng:
W=Wd+Wt=12mv2+Wt=mgl(1−cosα0)=h/s
II - CÁC DẠNG BÀI TẬP
1. Dạng 1: Xác định các đại lượng cơ bản trong dao động điều hòa của con lắc đơn
- Tìm ω,T,f : Đề cho l, g:
ω=√gl,T=2πω=2π√lg,f=ω2π=12π√gl
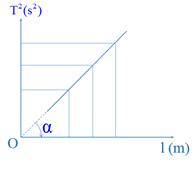
- Tìm gia tốc rơi tự do:
T=2πω=2π√lg→g=4π2lT2
2. Dạng 2: Tìm ω,T,f : thay đổi chiều dài dây treo l
- Trong cùng khoảng thời gian t, hai con lắc thực hiện N1 và N2 dao động:
-
f=Nt→gl=ω2=(2πf)2=(2πNt)2→l2l1=(N1N2)2
- Thay đổi chiều dài con lắc:
-
Ta có: T2∼l,f2∼1l,ω2∼1l
Ta suy ra:
(ω1ω2)2=(f1f2)2=l2l1=l1±Δll1
Ta có: T1=2π√ℓ1g⇒T21=4π2.ℓ1g;T2=2π√ℓ2g⇒T22=4π2.ℓ2g
Chu kỳ của con lắc có chiều dài ℓ3=ℓ1±ℓ2 là: T3=2π√ℓ1+ℓ2g⇒T23=4π2.(ℓ1±ℓ2g)=T21±T22
3. Dạng 3: Viết phương trình dao động điều hòa của con lắc đơn
- Bước 1: Xác định biên độ góc: S0,α0.
Sử dụng các dữ kiện đầu bài cho và hệ thức độc lập với thời gian: s20=s2+v2ω2hay α20=α2+v2l2ω2 hoặc α20=α2+v2lg
- Bước 2: Xác định tần số góc ω: ω=√gl=2πT=2πf
- Bước 3: Xác định pha ban đầu: φ
Tại t=0:{s=s0cosφv=−ωs0sinφ
- Bước 4: Viết PTDĐ: s=s0cos(ωt+φ)hayα=α0cos(ωt+φ)
Với s0=lα0